mc_rtc control
This tutorial aims to explain how to use ur5e robot on mc_rtc.
Requirements
- Please install mc_rtc using mc_rtc_superbuild.
Installation
-
ur_rtde (C++ interface for controlling and receiving data from an UR robot using the Real-Time Data Exchange (RTDE) interface of the robot)
sudo add-apt-repository ppa:sdurobotics/ur-rtde sudo apt-get update sudo apt install librtde librtde-dev
Then, you can download and put the following file in /mc-rtc-superbuild/extensions/ .
Then, the mc_rtc_superbuild can be recompiled to install all the dependencies mentioned in the cmake file.
Test installation
Create or edit the file ~/.config/mc_rtc/mc_rtc.yaml with the following content :
MainRobot: UR5e
Enabled: Posture
You can then run the following commands in separated terminals.
roslaunch mc_rtc_ticker display.launch
mc_rtc_ticker
You should see the robot in rviz and be able to control the joints position using the sliders in Tasks/target
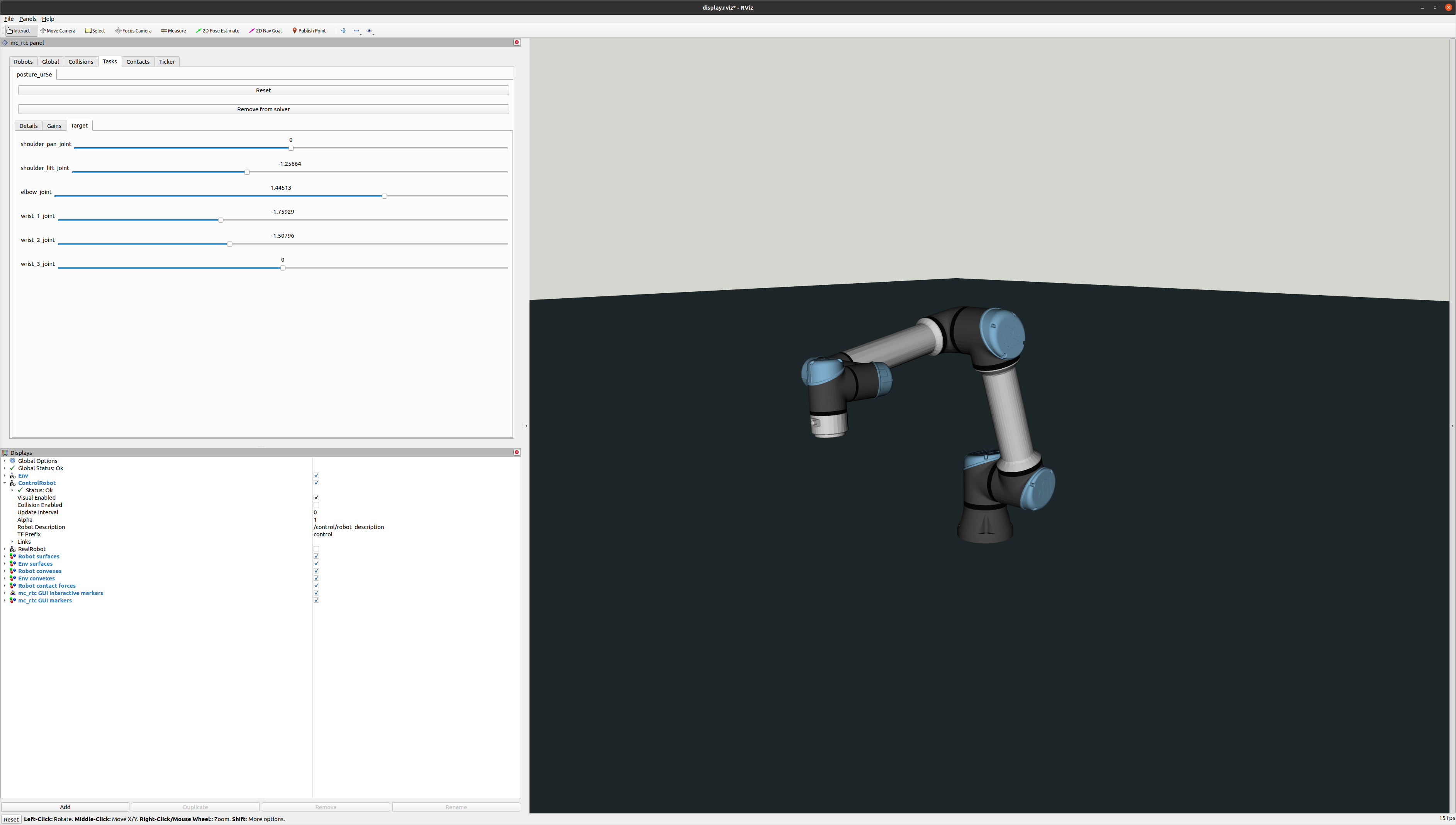
UR5e and mc_rtc control panel in rviz
Control your robot
In order to control your robot, you need to create a mc_rtc controller. Please refer to mc_rtc tutorials to learn how to create your first controller and get into mc_rtc.
TODO propose a controller example using a EndEffectorTask
-
Simulation
-
Real Robot