UR Setup
Requirements
Before going any deeper in the following documentation, please make sure the following packages are installed :
This can be installed from package using the following command or from source. I recommend using the last option as it lets you the possibility to check, understand and update the launch file of the robot bringup as it may be more convenient.
Using ros package
sudo apt install ros-${ROS_DISTRO}-ur-robot-driverFrom source :
[Optinal] Creation of a ur workspace mkdir -p ur_ws/src && cd ur_ws git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git src/Universal_Robots_ROS_Driver git clone -b melodic-devel https://github.com/ros-industrial/universal_robot.git src/universal_robot sudo apt update -qq rosdep update rosdep install --from-paths src --ignore-src -y catkin_make source devel/setup.bash
Initial robot setup
- Robot setup
To use ur_robot_driver with a real robot you need to make sure that externalcontrol-x.x.x.urcap is installed. install it
When it’s done, follow the necessary instructions to install it on the robot using the user interface.
- Turn On Robot
TODO add step pictures
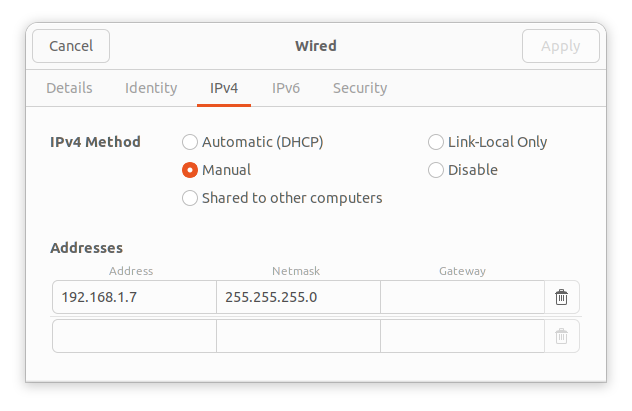
- Client computer setup
After plugging rj45 cable to the you computer, you can set network properties (Settings→Network)
- Calibration step
Since you network parameters are set, you can move on the calibration step.
Each UR robot is calibrated inside the factory giving exact forward and inverse kinematics. To also make use of this in ROS, you first have to extract the calibration information from the robot.
Run the following command to calibrate :
roslaunch ur_calibration calibration_correction.launch robot_ip:=<robot_ip> target_filename:="${HOME}/my_robot_calibration.yaml"
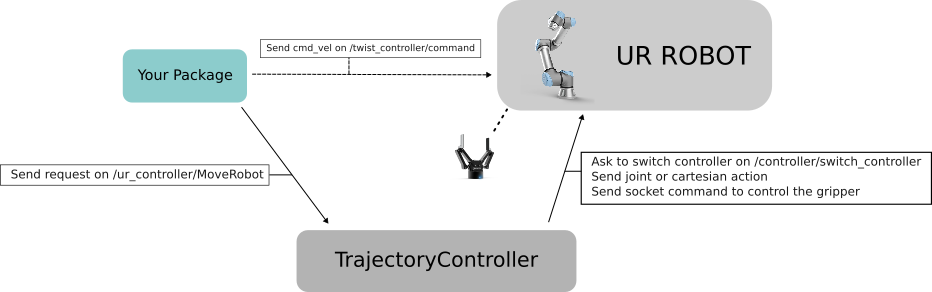
Control your robot
ur_controller is available to control your robot.
https://github.com/ThomasDuvinage/ur10_robotiq_control
Install
cd ur_ws/src
git clone https://github.com/ThomasDuvinage/ur10_robotiq_control.git
cd .. && catkin_make
Usage